Back to maker portfolio
2.007 Robot

February - May 2023
2.007 (Design and Manufacturing 1) project
This was a semester-long project for 2.007, which is perhaps one of MIT's most time intensive mechanical engineering classes. In this class, we were to individually build robots that would complete challenges on a competition table.
In my case, the challenge I chose was to lift 3 balls up 40 something inches (the robot's maximum allowed height was only 16 inches) and balance them on small holes in a moving platform. In the test run recorded below, my bot was able to lift and approach the platform, but missed the placement on all three balls.
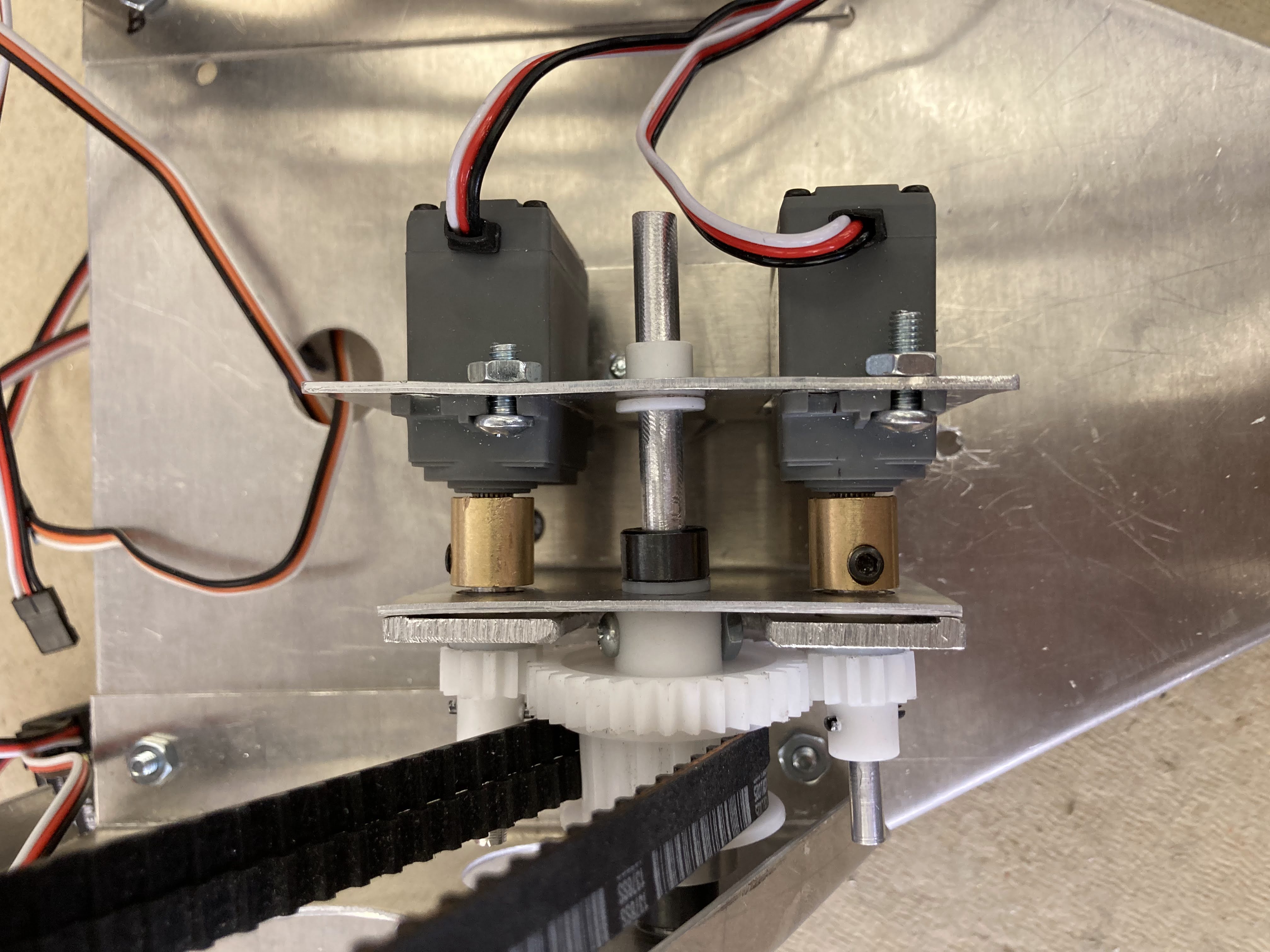
There were a lot of issues along the way, and basically every part had to be remade at some point or other. In particular was the issue of getting enough torque to lift the arm--I ended up using two torque servos with steep gear ratios, and even after that it required several iterations of motor mounts until I had a transmission stiff enough that the gears wouldn't skip/axles wouldn't deflect from the high forces being transmitted. Additionally, the members of the main lifting linkage were experiencing severe buckling deflection from the rubber bands, so I had to remake them with flanges bent in.